Virtual Pivot Steering With A Feasible Real-World Path
Detailed project page

Problem Definition
A forestry machine aiming to be more efficient when pathing through the forest and damaging the ground less while doing so.
- How can a new steering system be created to lessen the effect the current designs have on the ground?
- How can pathing be made more efficient?
Solution and Outcome
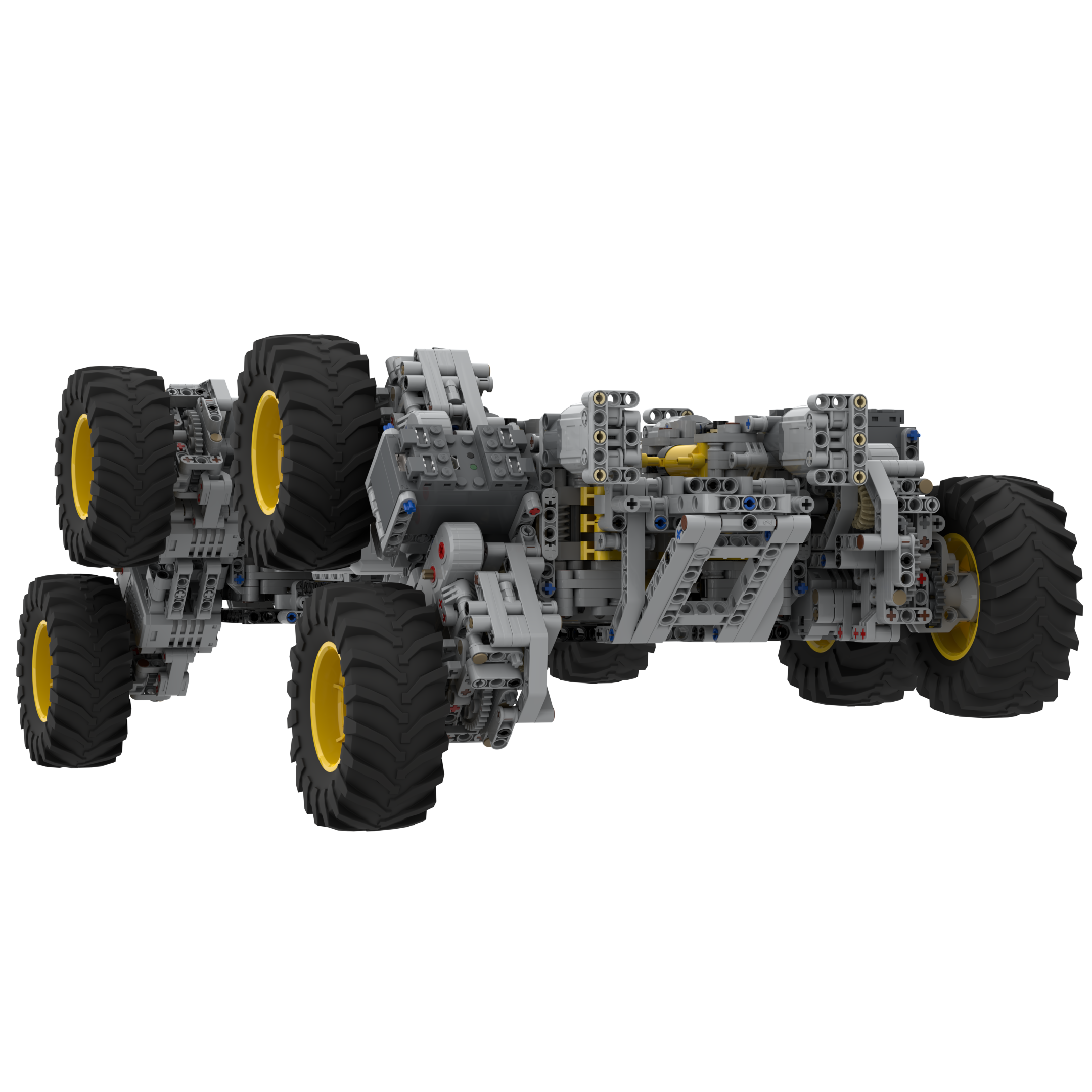
- An independent virtual pivot steering system and bogey lift mechanism is employed to solve these issues.
- The end result is an immensely capable platform with a feasible path to a real world implementation.
- Overall, this project completely revolutionizes current forestry transport and harvesting methods.
Presentation Context
Alongside the prototype development, I presented Leaf Walker in person to multiple audience types, including students as young as 8 years old and technically focused reviewers. Across those groups, people were still able to understand and appreciate the project's intent: reduce ground disturbance while improving pathing efficiency through virtual pivot steering and lockable bogey behavior. What changed per audience was the depth of geometry, tradeoff, and implementation detail.
Why?
This all started nearly five years ago when two events happened around the same time. First, I saw some really large machines in my friend's backyard, and they completely tore up their lawn. Then not too long after, those same machines tore up the local biking pump track... so I was then motivated to solve this issue of inefficient pathing and steering in any way possible. This project benefits the environment in various ways:
- Less ground disturbance: soil is not compacted as much, allowing for regrowth.
- Efficient pathing: less fuel is used, having a directly positive environmental impact.
- Safer operation: bogey lift suspension keeps the entire vehicle level on nearly any terrain, keeping the entire structure stable when loading and cutting on slopes.


How?

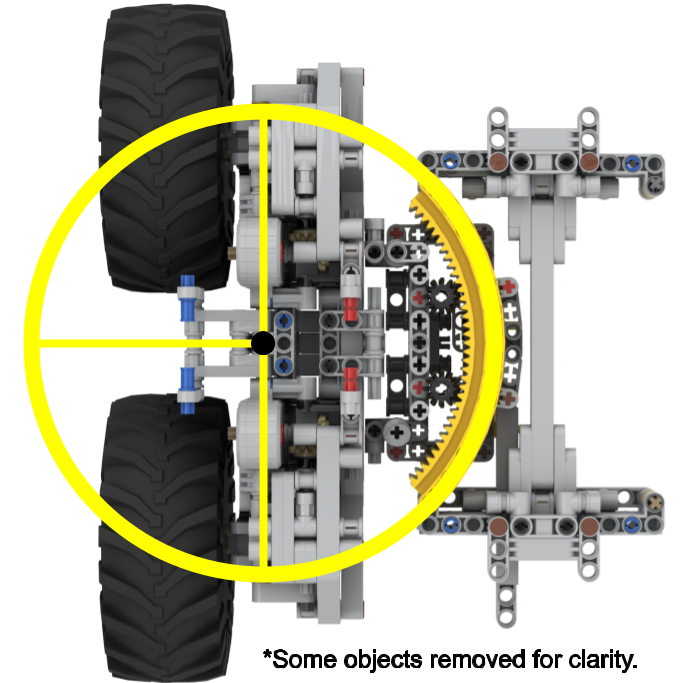
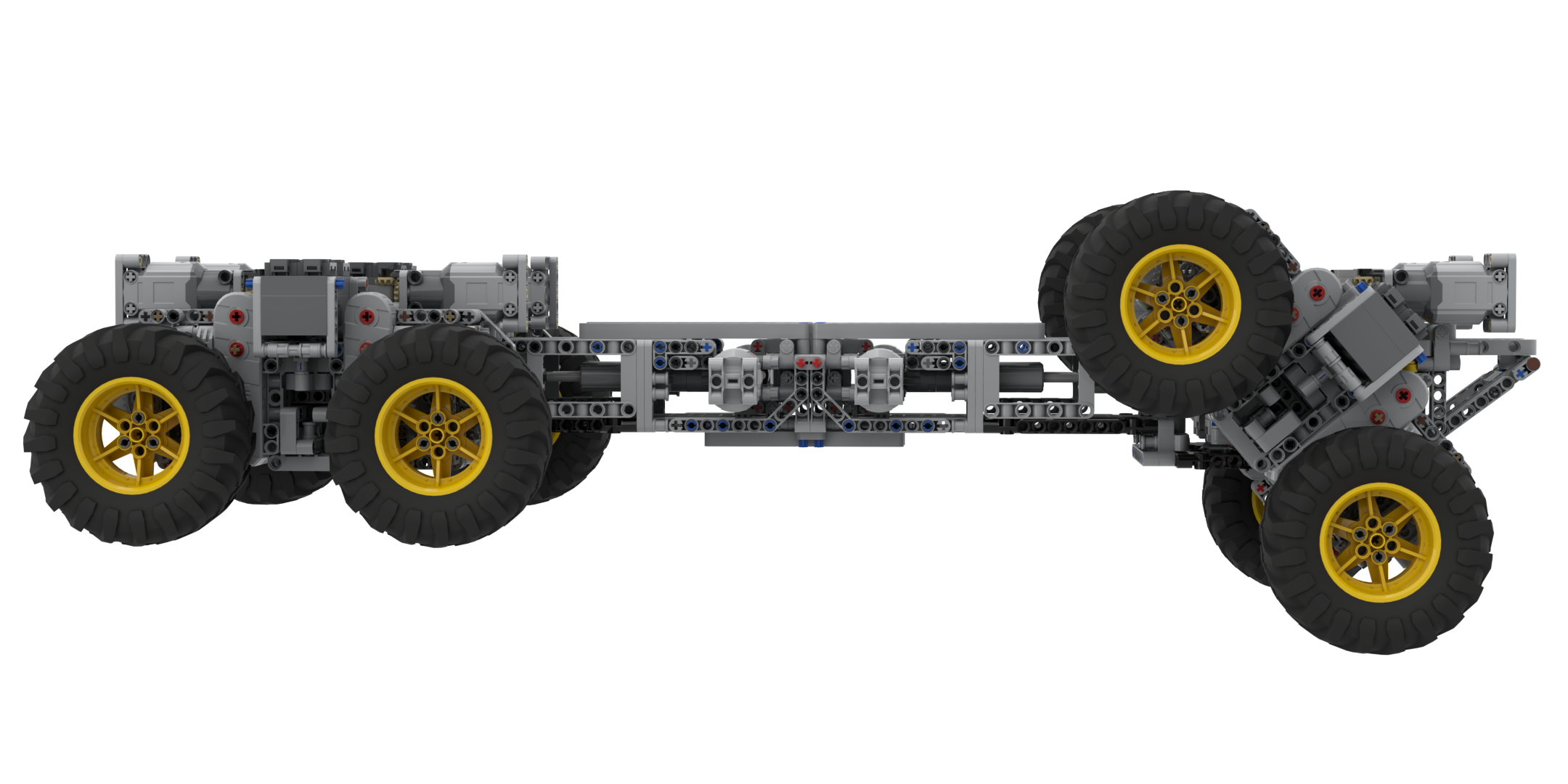
The platform replaces conventional articulated steering with a modified virtual pivot. Instead of turning around a point behind the cab, each wheel hub rides on a circular carriage so the effective pivot sits between the wheels, reducing turning arc and ground disturbance.
Each hub can operate as a free-spinning bogey for suspension travel or lock and drive when traction and control are needed, giving the machine a wider operating envelope across uneven terrain.
The design has been iterated for five years through documented LEGO-based prototypes. Each revision was tested for rigidity and off-road capability on the same obstacle course at full charge, with failures logged and fed back into the next build.
What Changed
Three constraints drove the redesign: oversized steering arcs, limited terrain clearance from a long wheelbase, and reduced stability under load. The final architecture pairs virtual pivot steering with lockable, powerable bogeys to improve efficiency, access, and chassis control.
Steering Arc and Tire Drag
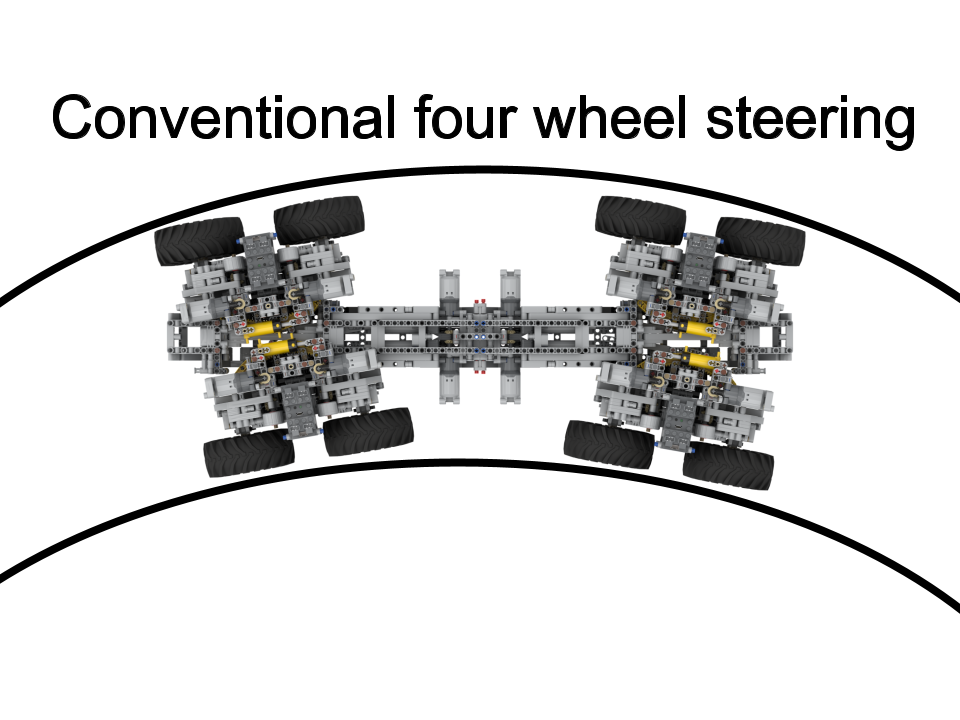
Conventional articulation pivots behind the cab, creating large drag arcs that disturb more ground and waste path length.
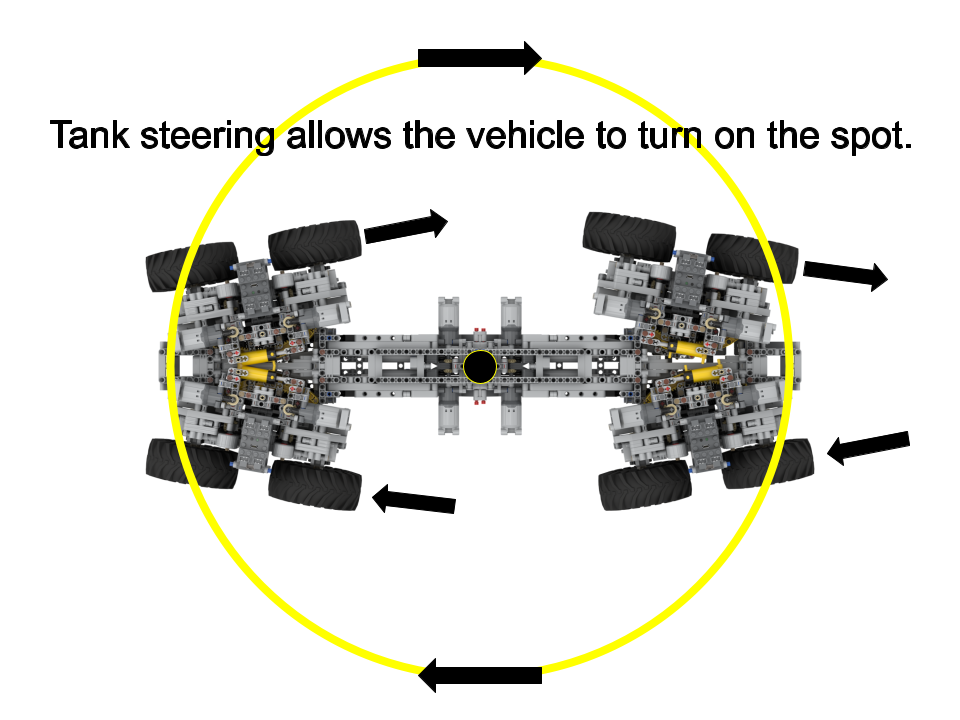
Fix: A virtual pivot moves the turning center between the wheels, enabling conventional, all-wheel, diagonal, and zero-point steering while keeping disturbance localized to contact patches.
Long Chassis Terrain Limits
Vehicle length reduced approach and breakover performance, forcing detours and extra fuel/time cost.
Fix: Selective front/rear ride-height adjustment via powered, lockable bogeys improves slope entry/exit and lowers high-centering risk.
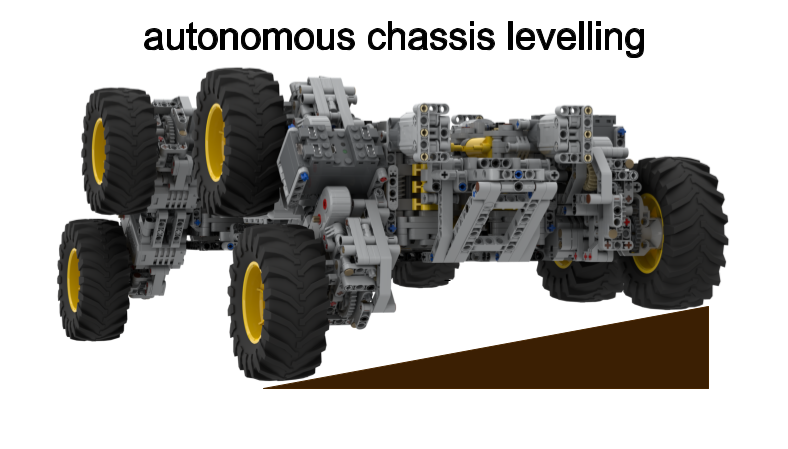
Loaded Stability on Slopes
A high center of gravity under load restricted safe traversable terrain and increased routing constraints.
Fix: Per-wheel bogey adjustment levels the chassis to slope shape/angle, preserving operator stability and expanding safe operating envelopes.
Result: the platform cuts pathing waste, reduces soil damage, climbs and exits steeper terrain, and remains stable under load while preserving articulated-system flexibility through a more efficient pivot strategy.